ТЕХНОЛОГИИ, ИНЖИНИРИНГ, ИННОВАЦИИ
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ

Беспилотные автомобили: начало – история длинною в век
 На фото: General motors Firebird II – первый автомобиль в мире с системой круиз-контроля. Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми. В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства. Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:
На фото: General motors Firebird II – первый автомобиль в мире с системой круиз-контроля. Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми. В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства. Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:


Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Беспилотный торпедный катер «Natalie».
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.

Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантастика
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.

В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!”
В 1933 году «Популярная механика» сообщила, что “они ушли в автоматику”, утверждая, что недавние изобретения, например, автоматическое открывание гаражных ворот и гидроусилитель руля, стали первыми шагами на пути к полностью автоматизированным автомобилям; “можно преобразовать автомобиль так, что он будет самостоятельно заводиться, открывать гаражную дверь и съезжать с проезжей части.”
В фильме 1935 года «Самое безопасное место» Chevrolet предсказал, что “если производитель сможет оснастить каждую машину автоматическим механизмом вождения, автомобиль всегда будет делать именно то, что он и должен делать, выезжая на дорогу. При таком управлении автомобиль не сможет выехать с обочины, не подав сигнал и не учитывая встречное движение. При таком управлении автомобиль будет ехать прямо, а не лавировать в потоке машин. С таким управлением он всегда будет перестраиваться в нужную полосу перед поворотом. Будет всегда останавливаться на знак «стоп». С автоматическим механизмом вождения автомобиль будет притормаживать перед тем, как нарушить движение. Он не будет подрезать машины перед опасным поворотом и всегда будет останавливаться перед жд переездом.”
В 1938 году «Популярная наука» в статье «Автострады будущего» предсказала, что через 50 лет аварии будут невозможны, связь между автомобилями будет осуществляться через инфракрасное излучение, а электрические кабели будут контролировать скорость автомобиля и со временем возьмут на себя полное управление автомобилем.
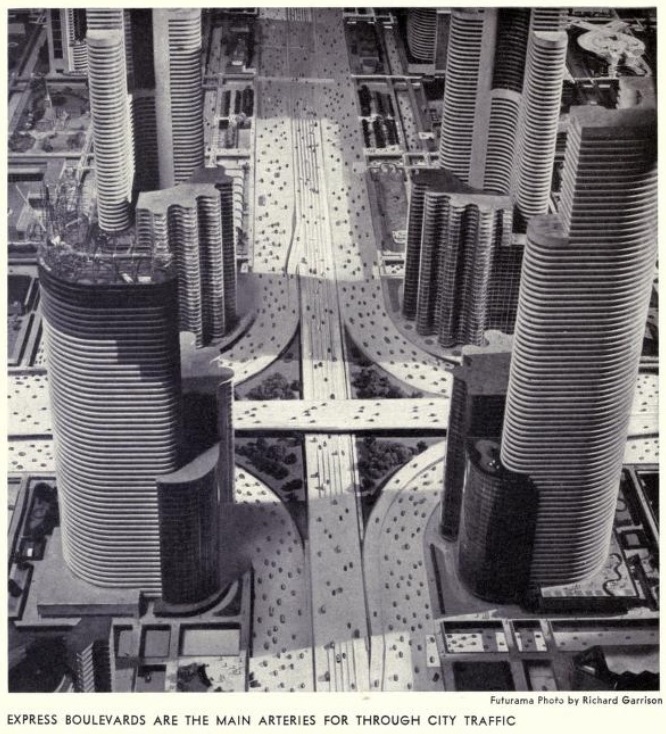
На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
Видео «К новым горизонтам», фильм экспозиции Футурама 1939 года, рассказывает о футуристическом утопическом мышлении накануне Второй мировой войны, которое предсказывал General Motors. В нем запечатлена экспозиция «Футурама» из павильона «К новым горизонтам» General Motors на всемирной выставке, которая устремила свой взор к “чудесному миру 1960-го”.
В 1953 году «Mechanix Illustrated» задал вопрос: “Почему у нас нет… анти-аварийных дорог… С автопилотами, чтобы принять на себя управление вместо вымотанных или пострадавших от аварии водителей? Если изобретатель сможет предложить водителю автопилот для машины, то только подумайте о колоссальной ценности такого устройства. Человеческий фактор будет исключен из процесса вождения. Наши дороги станут практически безаварийными.“ В статье рассматривалась система, основанная на магнитном детекторе, для контроля за боковым движением и радар для соблюдения дистанции.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”
В 1956 году для автосалона Motorama General Motors выпустил музыкальный короткометражный фильм „Ключ к будущему“, который ожидал, что в далеком будущем 1976 году будут ездить беспилотные автомобили. В 1958 журнал «Popular Science» писал, что »в вашем будущем автомобиль будет управляться черными ящиками, а вам останется только смотреть”, разработкой занимаются GM и RCA.

Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Поп культура
Уолт Дисней вывел воображение на новый уровень.
В эпизоде «Волшебная автострада США» из телесериала 1950-х годов «Волшебный мир Диснея», говорилось о появлении радарных датчиков, ночного видения, системы наведения движения и других футуристических особенностей транспортных средств. Автомобили по-прежнему изображались как существа способные мыслить и чувствовать, принимать собственные решения: в конце 1968 года Дисней создал Herbie, в фильме The Love Bug машина имела «собственный разум и сама собой управляла».
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
КИТТ управлял собой сам и обладал сканером, который позволял ему «видеть» окружающую среду. Еще больше беспилотных автомобилей появилось в фльмах Christine 1983 года, в Batman 1989-го, Total Recall 1990-го, Demolition Man 1993-го, the Fifth Element 1997-го и I, Robot 2004-го.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Часть вторая: Исследования и разработки
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.

Как писали в 1960 году, магниты, встроенные в транспортные средства, притягивались стальным кабелем, проложенным под дорогой, а диспетчерские вышки следили за общим транспортным потоком. Наступление новой революции казалось настолько неизбежным, что в 1960 году New York Times писал, что к «полномасштабному использованию мы придем через 15 лет».
Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.
Примерно в то же время в центре искусственного интеллекта Стэнфордского исследовательского института Нильс Нильссон разработал Shakey. Это был первый мобильный робот, способный воспринимать окружающую среду через «глаз» телевизионной камеры и с помощью усовидных щупалец. У Shakey также был план действий для выполнения поставленной задачи. Преемником Shakey стал луноход (CMU) Rover, разработанный в Университете Карнеги — Меллона.

Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
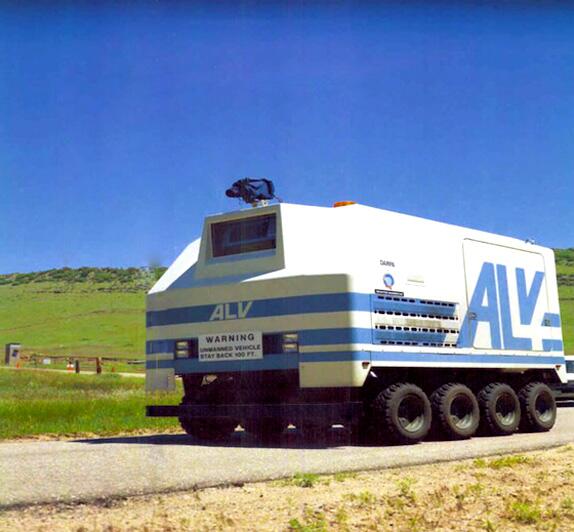
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.
Это исследование продолжилось в европейском финансируемом государством проекте EUREKA-«Прометей», (PROgraMme для европейского движения с наивысшей эффективностью и беспрецедентной безопасностью), который осуществлялся с 1987 по 1994 год. В него вошли многие европейские участники, а государственное финансирование было значительным.
В 1993 году компания Bosch представила разработанные в рамках проекта «Прометей» навигационные системы и камеры, способные распознавать полосы движения.
Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
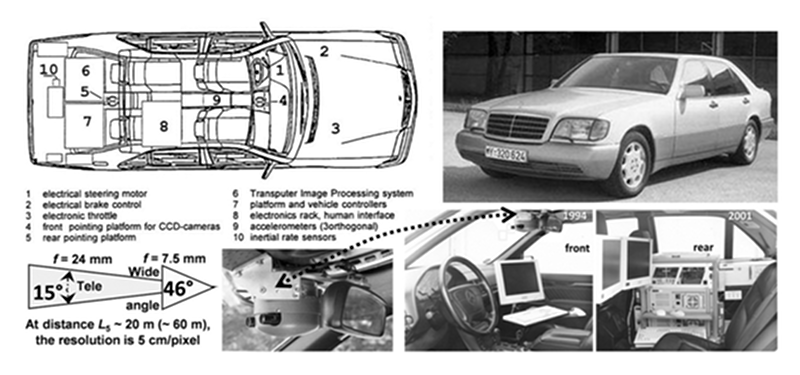
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.
