Что такое сельсин-датчик и зачем он необходим
Реализация технологического процесса предполагает использование различного оборудования. В некоторых случаях надо добиться синхронного и синфазного вращения осей различных устройств. Иногда по каким-то причинам механическое соединение не представляется возможным. Тогда вместо муфты используют сельсин — специальный датчик, благодаря которому можно добиться требуемой синхронизации. Он нередко входит в состав специальных систем, нуждающихся в повороте на некоторый угол на расстоянии. Сельсин работает в режиме приемника и передающего элемента. Стоит детально разобраться, что это такое, как работает и где может использоваться.

Виды синхронной связи
Прежде чем начать разбираться, что такое и как функционируют сельсины, стоит познакомиться с существующими разновидностями синхронной связи. По данному параметру системы принято делить на системы асинхронного вращения и поворота. Каждая разновидность имеет свои особенности.

Синхронное вращение
В состав входит два одинаковых асинхронных электродвигателя, оснащенных фазными роторами. Обмотки ротора соединяют. Статор подключают к 380 В.

Синхронный поворот
В состав входят сельсины, исполнение которых допускает самосинхронизацию. В зависимости от числа фаз они подразделяются на:

Посмотрите видео в конце, чтобы разобраться в особенностях подобной системы.
Системы синхронного поворота: основные режимы
Сельсины работают в двух режимах. Каждый из них имеет свои особенности которые надо обязательно учитывать при выборе оборудования.
Индикаторный
Если оборудование работает в данном режиме, значит, ротор принимающего устройства подсоединен к ведомой оси. Схема актуальна при выборе для ведомой оси минимального момента торможения и размещение на ней индикаторной стрелки. Обмотки возбуждения подключают к общей цепи. Синхронизирующие объединяют с линией связи.
Формируемые магнитные потоки инициируют возникновение ЭДС на обмотках всех фаз. Незначительная рассогласованность приводит к протеканию электротока. Благодаря потоку в датчиках и принимающем элементе сельсина образуются разнонаправленные моменты. С их помощью удается полностью нивелировать угол рассогласования.

Ротор, располагающийся на датчике, затормаживают. Как итог, момент синхронизации влияет на механизм, поворачивающий ведущую ось. Благодаря подобному конструктивному исполнению удается обеспечить одновременный поворот на одинаковый угол роторов обоих подключенных элементов.
Трансформаторный
Электросигнал, появляющийся при рассогласованности роторов, сначала поступает на усиливающую часть схемы. Далее — на ротор исполнительного механизма. Последний начинает поворачивать ротор принимающего элемента и ведомую ось до полного нивелирования имеющейся разницы. Подобный режим актуален при прикладывании к ведомой оси момента торможения, имеющий достаточно большую величину. То есть помогает повернуть механизм.
Обмотку датчика соединяют с ведущей осью и подключают к электросети на 220 В. Для подачи напряжения на элемент, отмечающий за управление двигателем, задействуют усилитель. Обмотку приемника используют для присоединения сельсина. Для объединения обмоток синхронизации двух сельсинов используется линия связи. В возбуждающей обмотке индуцируется ток, создающий в синхронизирующей обмотке ЭДС.

Ток протекает по обоим элементам, так как их обмотки соединены. В принимающем элементе формируются магнитные импульсы. Если элементы рассогласованы, под действием потока в обмотке возникает ЭДС. На входе появляется напряжение, запускающее специальный усиливающий элемент. От него напряжение поступает на статор, принадлежащий исполнительному устройству. Это приводит к тому, что ведомая ось начинает поворачиваться следом за ротором приемника. По мере устранения имеющейся разницы, напряжение становится равным нулю, и вращение ведомой оси прекращается.
Особенности используемой технологии и конструкция влияют на величину погрешности. К таковым относят:
При передаче угла неизбежно возникают погрешности. Их появление обусловлено определенными условиями эксплуатации. При изменении величины сопротивления в сети управления, порядок работы сельсинов изменится.
Конструкция
Исполнение сельсинов диктует их принцип действия. Принято выделять:
Каждая разновидность имеет свои отличительные особенности, с которым стоит обязательно ознакомиться, чтобы понять принцип работы.
Контактные
Контактные по своему исполнению аналогичны асинхронным электродвигателям с фазным ротором и малой мощностью. В их состав входят неявнополюсные ротор и статор. Благодаря этому обе обмотки – распределенные. У ротора предусмотрена обмотка возбуждения. Для подвода электротока используются два кольца.

У отдельных моделей уже имеется статор и ротор. Это их явное преимущество. В результате величина момента синхронизации возрастает. Однако контактные элементы в этом случае — явный недостаток.
Бесконтактные
Для их включения не нужны никакие контактные элементы. Обе обмотки изначально устанавливаются на статоре. Ротор имеет характерную цилиндрическую форму. Для его изготовления используется материал, имеющие ферримагнитные свойства. Алюминиевая прослойка делит роток на два полюса.
Торообразные сердечники располагаются на торцах сельсинов. Их внутренняя часть располагается над ротором. Наружная соединяется со стержнями внешнего магнитопровода. Для изготовления сердечников используется электротехническая листовая стали. Однофазная обмотка устройства состоит из двух дисковых катушек, располагающихся по обеим сторона статора между сердечниками и обмоткой синхронизации.

В процессе работы устройства происходит замыкание магнитного потока импульсного типа. Трехфазная синхронизирующая обмотка соединяется на статоре. Положение оси потока магнитной индукции по мере изменения пространственного положения ротора изменяется. Он занимает иное положение относительно синхронизирующих обмоток. Величина возникающей ЭДС напрямую зависит от величины угла, на который смог повернуться ротор.
К недостаткам подобных устройств является не такое эффективное использование активных материалов. Кроме того, они в среднем на 50% тяжелее контактных аналогов, что обусловлено большими воздушными зазорами. Благодаря последним, величина токов намагничивания возрастает.
Видео по теме
Сельсин


Сельсин — индукционная машина системы индукционной связи. Сельсинами (от англ. self-synchronizing ) называются электрические микромашины переменного тока, обладающие свойством самосинхронизации. Сельсин передачи работают по принципу обычной механической передачи, только крутящий момент между валами передаётся не зубьями шестерён, а магнитным потоком без непосредственного контакта.
В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом (например, на РЛС — радиолокационных системах с вращающейся антенной). Такие задачи решаются с помощью систем синхронной связи.
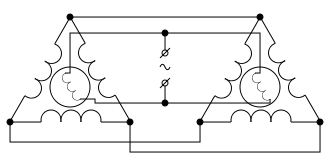
Простейший сельсин состоит из статора с трёхфазной обмоткой (схема включения — треугольник или звезда) и ротора с однофазной обмоткой. Два таких устройства электрически соединяются друг с другом одноимёнными выводами — статор со статором и ротор с ротором. На роторы подаётся одинаковое переменное напряжение. При таких условиях вращение ротора одного сельсина вызывает поворот ротора другого сельсина. При повороте одного из сельсинов (сельсин-датчика) на определённый угол в нём наводится ЭДС, отличная от первоначальной. Поскольку сельсины (их роторы) соединены, то эта же ЭДС будет возникать и во втором сельсине (сельсин-приёмнике) и по правилу левой руки он отклонится от первоначального положения на тот же угол.
Содержание
Типы и режимы работы
Сельсины и системы дистанционной передачи угла поворота подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга.
Однофазные сельсины
Однофазные сельсины могут работать в двух режимах.

Для обоих режимов существуют схемы включения:
Недостатки, решения
В современных устройствах сельсины всё чаще заменяются энкодерами. И только там, где простота, надёжность и ремонтопригодность важнее точности (например, в авиации), сельсины всё ещё остаются незаменимыми.
См.также
Литература

Полезное
Смотреть что такое «Сельсин» в других словарях:
СЕЛЬСИН — (англ. selsyn от англ. self сам и греч. synchronos одновременный), электрическая машина для дистанционной передачи информации об угле поворота вала др. машины. Применяется, напр., для дистанционного управления, передачи на расстояние показаний… … Большой Энциклопедический словарь
сельсин — сущ., кол во синонимов: 3 • автосин (1) • дифсельсин (1) • синхронизатор (1) … Словарь синонимов
сельсин — Информационная электрическая машина переменного тока, предназначенная для выработки напряжений, амплитуды и фазы которых определяются угловым положением ротора, и применяемая в качестве датчика или приемника в системах дистанционной синхронной… … Справочник технического переводчика
сельсин — (англ. selsyn, от англ. self сам и греч. sýnchronos одновременный), электрическая машина для дистанционной передачи информации об угле поворота вала другой машине. Применяется, например, для дистанционного управления, передачи на расстояние… … Энциклопедический словарь
сельсин — (англ. selsyn self сам гр. syn (chronos) одновременный) самосинхронизирующаяся электрическая машина для передачи на расстояние информации об угле поворота вала другой машины; примен. в системах автоматики и в телемеханике. Новый словарь… … Словарь иностранных слов русского языка
сельсин — selsinas statusas T sritis automatika atitikmenys: angl. rotary resolver; selsyn; synchro vok. Drehmelder, m; Selsyn, n rus. сельсин, m pranc. selsyn, m; synchro, m … Automatikos terminų žodynas
сельсин — selsinas statusas T sritis fizika atitikmenys: angl. selsyn vok. Drehmelder, m; Selsyn, m rus. сельсин, m pranc. selsyn, m … Fizikos terminų žodynas
Сельсин — (англ. selsyn, от англ. self сам и греч. sýnchronos одновременный, синхронный) Электрическая машина, позволяющая осуществлять угловое перемещение вала какого либо устройства или механизма в соответствии с угловым перемещением другого вала … Большая советская энциклопедия
сельсин — сельсин, сельсины, сельсина, сельсинов, сельсину, сельсинам, сельсин, сельсины, сельсином, сельсинами, сельсине, сельсинах (Источник: «Полная акцентуированная парадигма по А. А. Зализняку») … Формы слов
СЕЛЬСИН — (англ. selsyn, от англ. self сам и греч. synchronos одновременный, синхронный) электрич. машина перем. тока, предназнач. для синхронного перемещения вала к. л. устройства в соответствии с угловым перемещением др. вала, механически не связанного с … Большой энциклопедический политехнический словарь
Сельсины что это такое

§ 5.1 Общие положения
В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом. Такие задачи решаются с помощью систем синхронной связи.
Различают два вида систем синхронной связи: синхронного вращения («электрический вал»); и синхронного поворота («передача угла»).
В простейшем случае «электрический вал» может быть реализован на двух одинаковых асинхронных двигателях с фазным ротором, обмотки статора которых питаются от одной и той же сети трехфазного тока, а обмотки ротора соединены друг с другом (рис.5.1).

Рис. 5.1. Схема «электрического вала»
Сельсины бывают трехфазные и однофазные. Трехфазные сельсины конструктивно ничем не отличаются от асинхронных двигателей с фазным ротором. Однако они не получили большого распространения главным образом из-за неравенства синхронизирующих моментов при повороте ротора по полю и против поля.
Однофазные сельсины конструктивно похожи на синхронные машины малой мощности, обмотка возбуждения которых питаются переменным током.
В системах автоматики «передача угла» осуществляется по двум, принципиально разным схемам: индикаторной и трансформаторной.
Индикаторная схема используется там, где на приемной оси небольшой момент статического сопротивления (стрелка, шкала прибора и т.п.). В этих схемах сельсин-приемник самостоятельно отрабатывает угол, заданный датчиком.
Трансформаторная схема применяется в тех случаях, когда на приемной оси имеется значительный момент сопротивления. В таких схемах сельсин-приемник лишь управляет мощным силовым двигателем, осуществляющим поворот какого-то механизма.
Строго говоря, в каждой схеме должны использоваться свои сельсины: индикаторные или трансформаторные, хотя один и тот же сельсин может работать в любой из них.
§ 5.2 Устройство сельсинов
Сельсины состоят из статора и ротора. Они имеют одну обмотку возбуждения и три, сдвинутых в пространстве на 120 0 и соединенных в звезду, обмотки синхронизации. Сельсины бывают контактные и бесконтактные.

Рис.5.2. Конструктивные схемы контактных сельсинов
Магнитная система контактных сельсинов может быть неявнополюсной (рис.5.2, а,) или явнополюсной (рис.5.2, б, в). Обмотка возбуждения может располагаться как на роторе, так и на статоре. Первая конструкция более предпочтительна, т.к. имеет только два кольца вместо трех.
Большим недостатком контактных сельсинов является наличие скользящего контакта, переходное сопротивление которого может изменяться в довольно широких пределах. Это снижает точность передачи угла и уменьшает надежность работы систем синхронной связи.
Широкое распространение получили бесконтактные сельсины, не имеющие указанного недостатка.

Рис. 5.3. Конструктивная схема и магнитная цепь бесконтактного сельсина
Недостатком бесконтактных сельсинов является худшее использование активных материалов. Их масса примерно в 1, 5 раза больше, чем контактных. Объясняется это большими воздушными зазорами, вследствие чего сельсины имеют значительные потоки рассеяния и большие намагничивающие токи.
§ 5.3 Работа сельсинов в индикаторном режиме
Схема индикаторной связи приведена на рис. 5.4. Будем считать, что оба сельсина совершенно одинаковы и от одного датчика питается только один приемник.

Рис. 5.4. Индикаторная схема «передачи угла»
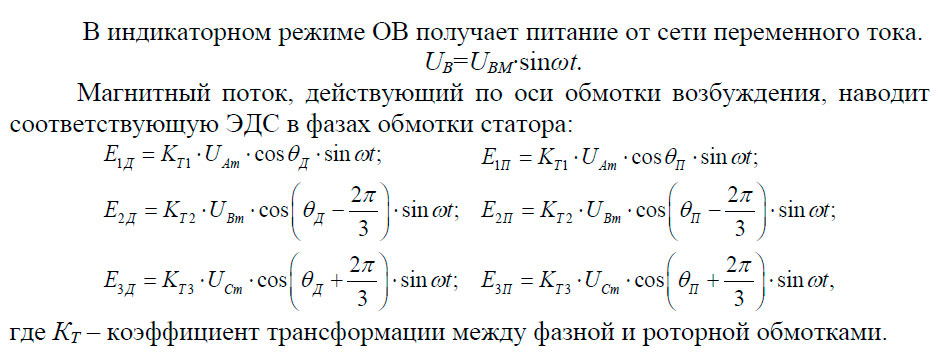
При питании обмоток возбуждения датчика и приемника переменным током возникают пульсирующие потоки возбуждения Фвд и Фвп, которые индуцируют в обмотках синхронизации ЭДС (Ед1. Еп3). Величина каждой ЭДС зависит от углового положения соответствующей обмотки относительно оси поля возбуждения. Если принять гармонический закон распределения индукции магнитного поля, то:

Здесь Еm-максимальное значение ЭДС, которое получается при соосном положении обмотки синхронизации и обмотки возбуждения. Из рис. 5.4 видно, что в любой момент времени ЭДС одноименных фаз датчика и приемника направлены встречно. Если сельсины находятся в согласованном положении, ЭДС одноименных фаз датчика и приемника равны по величине и уравновешивают друга.
При повороте датчика на угол aд равенство ЭДС нарушается. По обмоткам синхронизации и линиям связи протекают токи, которые, взаимодействуя с потоками возбуждения, создают моменты, в равной мере действующие на вал датчика и приемника. Поскольку датчик обычно фиксируется, приемник будет поворачиваться в ту же сторону и на такой же угол, ибо только при согласованном положении ЭДС вновь будут уравновешивать друг друга.
Найдем выражение синхронизирующего момента сельсинов.
Так как одноименные фазы датчика и приемника соединены встречно, то проходящий по ним ток:

где Zф-полное сопротивление обмотки синхронизации одного из сельсинов плюс половина сопротивления линии связи.
Подставляя значения ЭДС, учитывая, что

и обозначая разность углов поворота датчика и приемника aд-aпчерез угол рассогласования q, получим


Рис.5.5. Зависимость токов в обмотках синхронизации в функции угла рассогласования
Сельсины
Содержание
Конструкция и принцип действия сельсина
Сельсинами называют электрические микромашины, обладающие способностью самосинхронизации и применяемые в индукционных системах синхронной связи в качестве датчиков и приемников. Слово «сельсин» происходит от английских слов self–synchronizing, что означает самосинхронизирующийся. Сельсин-передачи работают аналогично обычным механическим передачам, но в них крутящий момент между валами создаётся не при помощи непосредственно контактирующих шестерён, а посредством изменяющегося магнитного потока.
В системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом.
Сельсины применяются для различных целей:
Сельсины представляют собой индукционные электрические машины переменного тока. Статор и ротор сельсина выполняются в виде магнитопроводов специальной конструкции. Для уменьшения потерь они набираются из тонкой электротехнической стали. В пазах статора и ротора укладывается обмотка возбуждения (первичная обмотка) и обмотка синхронизации (вторичная обмотка).
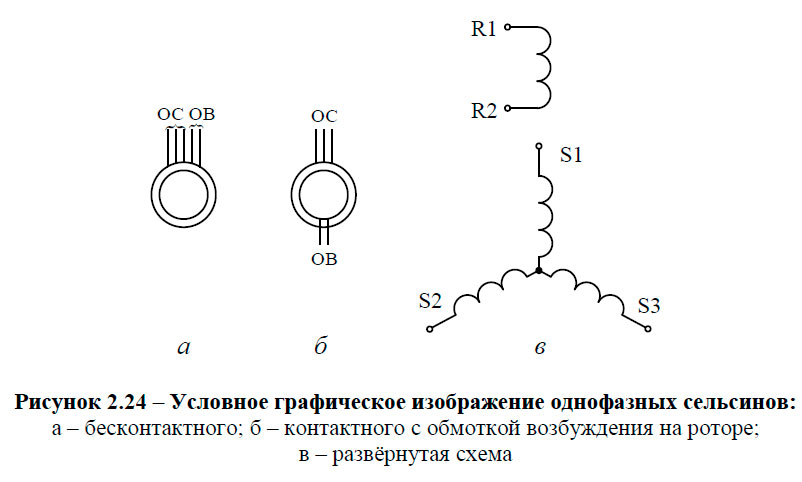
Условное графическое изображение и буквенное обозначение сельсинов на схемах показано на рисунке 2.24. Выводы обмотки синхронизации маркируют буквами S1, S2, S3, выводы обмотки возбуждения – буквами R1, R2. Буквенное обозначение сельсинов: BE – приёмник, ВС – датчик.
Сельсины подразделяются на две группы: трёхфазные силовые и однофазные.
Трёхфазные сельсины применяются в системах, где требуется обеспечить синфазное и синхронное вращение двух двигателей (валов), находящихся на расстоянии друг от друга. Трехфазный сельсин имеет трехфазную обмотку возбуждения и трехфазную обмотку синхронизации. Такие сельсины по конструкции не отличаются от обычных асинхронных двигателей и применяются в основном при больших мощностях.
Однофазный сельсин содержит однофазную обмотку возбуждения (ОВ), трёхфазную обмотку синхронизации (ОС), магнитопровод, вал и конструктивные элементы. Сельсины бывают бесконтактными и контактными. В первых, обе обмотки расположены на статоре, во-вторых сельсинах – одна обмотка расположена на статоре, другая – на роторе. Обмотка синхронизации распределена по пазам, обмотка возбуждения выполняется сосредоточенной в виде катушек на полюсах либо распределённой по пазам. В контактном сельсине электрическая связь с обмоткой, расположенной на роторе, осуществляется с помощью контактных колец и щёток. Принцип работы сельсина не зависит от места расположения каждой из обмоток: на статоре или на роторе. Однако наибольшее распространение получили сельсины с обмоткой возбуждения на роторе и обмоткой синхронизации на статоре (рисунок 1, б). У них меньше контактных колец и щеток, что обеспечивает более высокую надежность, меньший момент трения и объем сельсина. В цепи передачи сигнала (линии связи обмоток синхронизации) отсутствуют скользящие контакты. При такой конструкции проще выполнить демпферную обмотку на роторе.
Наличие скользящих контактов значительно снижает надежность контактных сельсинов. Бесконтактные сельсины подразделяются на:
Недостатком бесконтактных сельсинов является худшее использование активных материалов. Их масса примерно в 1,5 раза больше, чем контактных. Объясняется это большими воздушными зазорами, вследствие чего сельсины имеют значительные потоки рассеяния и большие намагничивающие токи.
Для повышения точности применяют пару сельсинов – «грубый» и «точный» (последний установлен через редуктор и за один оборот основного вала делает несколько оборотов). Если сигнал с грубого сельсина слабее некоторого порога, автоматика передаёт в линию связи сигнал с точного сельсина. Для подавления колебаний ротора, не имеющего нагрузочного момента используются механические демпферы.
Однофазные сельсины могут работать в двух режимах: индикаторном и трансформаторном.
Сельсин–датчик принудительно поворачивается на определённый угол, а сельсин-приёмник устанавливается в соответствующее ему положение (рисунок 2.25). Индикаторная схема применяется для синхронной дистанционной передачи угла поворота и различных величин, предварительно преобразованных в угловое перемещение, когда на выходе нет значительного крутящего момента.
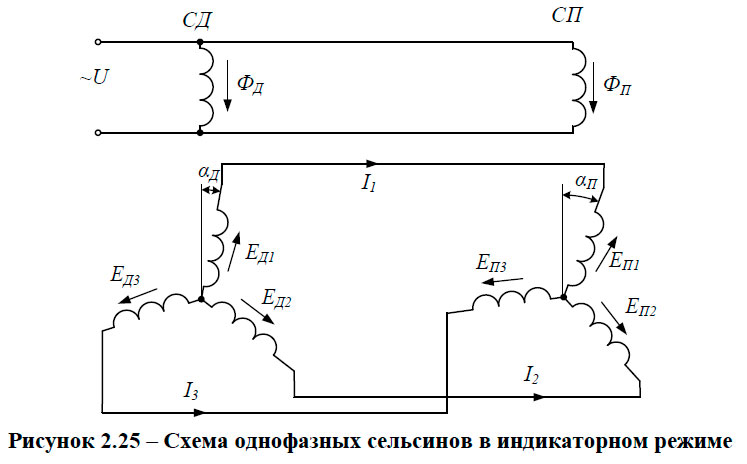
Если ротор сельсина-датчика вывести из согласованного положения и зафиксировать (затормозить), то угол рассогласования Δα = αД – αП будет отличным от нуля. В этом случае в обмотках синхронизации и линий связи потекут уравнительные токи Ii, так как ΔEi ≠0.

где ZФ – полное сопротивление фазной обмотки сельсина.
При взаимодействии магнитных потоков, создаваемых уравнительными токами, с потоком возбуждения ФД и ФП на валах роторов сельсина-датчика и сельсина-приемника возникают синхронизирующие моменты, которые стремятся повернуть роторы в согласованное положение. Так как ротор сельсин-приемник не заторможен, то под действием вращающего момента он придет в согласование (синфазное) положение с ротором сельсина-датчика, т.е. положение, когда Δα=αД–αП=0.
Величина момента, поворачивающего ротор сельсина-приемника, является функцией угла рассогласования:
где ММ – максимальный момент сельсина, определяемый его параметрами.
Моментно-угловая зависимость является статической характеристикой сельсинной пары, работающей в индикаторном режиме.
В индикаторном режиме передача угла происходит со статической угловой погрешностью. При работе без нагрузки погрешность, вызванная собственным моментом трения МТ сельсина-приемника, является основной и характеризует величину зоны нечувствительности приемника, в пределах которой ротор приемника может занять любое положение при одном и том же положении датчика.
В процессе эксплуатации на точность передачи влияют колебания напряжения и частоты питающей сети и сопротивление линии связи сельсинов. Уменьшение напряжения и увеличение частоты приводят к уменьшению потока возбуждения Ф. Увеличение расстояния между сельсинами и сопротивления линии связи снижает величину тока в обмотках синхронизации и МДС Fmax. В обоих случаях уменьшается синхронизирующий момент и точность передачи. Резкое снижение точности передачи наступает при появлении момента нагрузки на валу приемника.
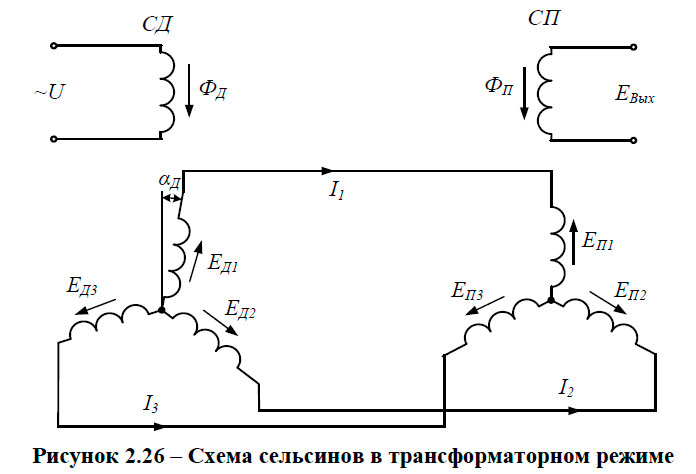
Сельсин-датчик принудительно поворачивается на определённый угол, а на выходе сельсин-приёмника формируется напряжение, являющееся функцией угла рассогласования между ними (рисунок 2.26). Трансформаторная схема синхронной передачи угла применяется тогда, когда на ведомой оси имеется значительный момент сопротивления.
Обмотка возбуждения сельсина-датчика, как и в случае индикаторного режима, подключена к питающей сети и служит для создания в магнитной системе машины пульсирующего магнитного потока. Обмотки синхронизации датчика и приемника соединены между собой линия связи. Обмотка возбуждения сельсина-приемника предназначена для выработки сигнала (напряжения), зависящего от угла рассогласования. В исходном положении ротора СД ось обмотки 1 совпадает с осью обмотки возбуждения ОВ, в которой наводится максимальная э.д.с. При повороте ротора СД обмотки 1,2 и 3 смещаются. Эти токи создают в сельсине–приемнике магнитный поток, направленный под углом Δα=αД–αП к продольной оси выходной однофазной обмотки. В выходной обмотке наводится ЭДС, которая является выходным сигналом сельсинной пары:
где Uм – максимальное значение напряжения, наводимого в ОВ.
При этом по линии связи передается незначительный по мощности сигнал, затем сигнал усиливается, приводит во вращение исполнительный двигатель, который, перемещая объект управления, одновременно уменьшает угол рассогласования между сельсином-датчиком и сельсином-приемником.
Уменьшение максимально допустимых погрешностей сельсинов в трансформаторном режиме по сравнению с индикаторным объясняется тем, что точность работы сельсинов в трансформаторном режиме определяется только их магнитной и электрической симметрией, а не величиной паразитных моментов на валу.
Для обоих режимов существуют схемы включения:
Многократный режим включения
Иногда требуется передать на расстояние угловую величину не в одно, а в несколько мест. Например, когда положение какого-либо регулирующего органа необходимо передать на главный пульт управления и местные наладочные пульты и т.д. Тогда к одному датчику подключают несколько сельсинов–приемников. Такой режим называют многократным приемом (рисунок 2.27).
В силу снижения моментов у сельсинов-приемников точность передачи будет значительно снижена.
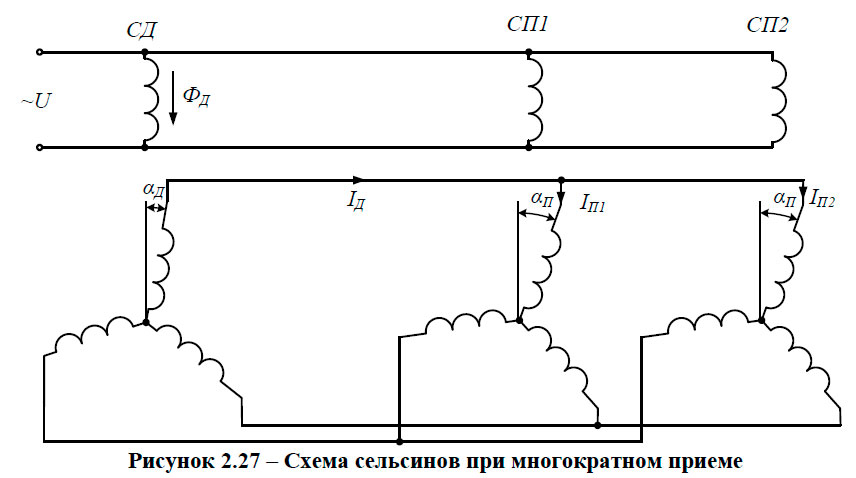
Для того чтобы сохранить синхронизирующий момент приемников, выбирают сельсин-датчик в n раз мощнее сельсинов–приемников, т.е. сопротивление его обмотки синхронизации будет в n раз меньше сопротивления обмотки синхронизации каждого сельсина-приемника.
Дифференциальный режим включения
В системах дистанционной передачи угла применяются дифференциальные сельсины, назначение которых – воспроизводить угол поворота, равный сумме или разности углов, заданных двумя сельсинами-датчиками. Дифференциальный сельсин имеет две трехфазные обмотки, одна из которых расположена в пазах неявнополюсного статора, а другая – в пазах неявнополюсного ротора. Вывод обмотки ротора для подключения к внешней сети осуществлен посредством трех контактных колец и щеток. Рассмотрим принцип работы индикаторной системы дистанционной передачи угла, содержащей два сельсина-датчика СД1 и СД2, и один дифференциальный сельсин приемник СП–СД (рисунок 2.28). Допустим, что ротор дифференциального сельсина заторможен. При включении в сеть переменного тока обмоток возбуждения сельсинов-датчиков СД1 и СД2 создаются пульсирующие магнитные потоки ФВ1 и ФВ2. Поток ФВ1 наводит в обмотках фазы синхронизации датчика СД1 электродвижущие силы, под действием которых в цепи синхронизации этого сельсина появятся токи. Проходя по обмотке синхронизации дифференциального сельсина, эти токи создают МДС FДС1. При повороте ротора датчика СД1 на угол αД1 по часовой стрелке вектор МДС FДС1 повернется на такой же угол, но против часовой стрелки. Аналогичные процессы происходят и в цепи синхронизации обмоток датчика СД2 и дифференциального сельсина: при повороте ротора датчика СД2 на угол αД2 по часовой стрелке вектор МДС FДС2 обмотки ротора дифференциального сельсина также повернется на угол αД2, но против часовой стрелки. В итоге между векторами МДС FДС1 и FДС2 дифференциального сельсина появится пространственный угол, равный разности углов, заданных датчиками СД1 и СД2.
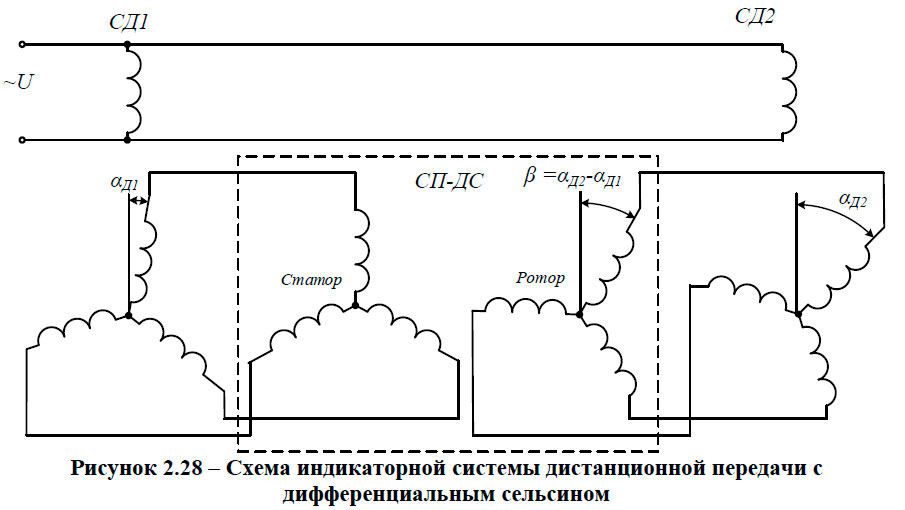
В результате взаимодействия МДС FДС1 и FДС2 на роторе дифференциального сельсина возникает вращающий момент МД. Поэтому, если растормозить ротор дифференциального сельсина СП–ДС, то под действием момента МД ротор повернется на угол β так, чтобы векторы МДС FДС1 и FДС2 совпали по направлению и создали в магнитной системе дифференциального сельсина результирующий магнитный поток. Если роторы датчиков СД1 и СД2 повернуть на углы αД1 и αД2 в разные стороны, то ротором дифференциального сельсина будет воспроизведен угол поворота, равный разности заданных углов. Особенностью работы индикаторных систем с дифференциальными сельсинами является протекание токов в цепях синхронизации после отработки дифференциальным сельсином заданных углов, т.е. в согласованном состоянии.