Управление дифферентом глиссирующего катера
В ряде материалов, опубликованных в сборнике, и в популярной литературе (см., например, «Катера, лодки и моторы в вопросах и ответах», Л., «Судостроение», 1977) неоднократно обращалось внимание любителей на важность правильного подбора гребного винта с учетом всех тех постоянных и переменных факторов, от которых, в конечном счете, зависит достижимая в конкретных условиях скорость мотолодки или катера. Винт с правильно подобранными диаметром и шагом позволяет, как известно, наиболее эффективно использовать мощность двигателя для создания силы тяги, движущей судно (см., например, статью «Потерянные силы»). Известно, что благодаря применению на подвесных моторах грузовых винтов уменьшенного шага вместо штатных удается повысить скорость большинства туристских мотолодок с полной нагрузкой на 30% и даже более; соответственно снижается и расход горючего на пройденный километр.
Важную роль играет и расположение гребного винта относительно корпуса судна, — оптимальные заглубление оси винта и ее наклон к горизонту, расположение и форма кронштейнов гребного вала (подводной части колонки, подвесного мотора), расположение и форма ближайших частей корпуса судна и т. д. Немаловажно и состояние поверхностей погруженной части корпуса: опытные судоводители-любители, не говоря уже о гонщиках, уделяют большое внимание всем доступным мерам уменьшения сопротивления трения обшивки и сопротивления выступающих частей. Обо всем этом также говорилось не раз.
Цель этой статьи — обратить внимание начинающих капитанов на то, что в большинстве случаев практически не используется еще один и довольно существенный резерв повышения скорости и соответствующей экономии горючего. Речь идет о снижении сопротивления воды движению глиссирующего судна только за счет того, что на всех этапах плавания поддерживается оптимальным ходовой дифферент — угол атаки днища к горизонту воды. Опыт показывает, что нередко благодаря изменению ходового дифферента удается повысить скорость на 15, а то и 20%!
Разумеется, и по данному вопросу можно напомнить целый ряд полезных публикаций. Так, еще в 6 выпуске сборника «Катера и яхты» (1966 г.) была напечатана краткая, но содержательная статья Л. М. Кривоносова «О ходовом дифференте катера». Однако в сегодняшних условиях, когда вопросам экономичности придается особое значение, стоит вернуться к этой важной теме.
В принципе для каждого катера (для краткости будем называть так любое моторное глиссирующее судно) существует оптимальный для каждой определенной скорости угол атаки, при котором сопротивление воды движению имеет минимальное значение. В зависимости от соотношения смоченной длины и ширины рабочего — глиссирующего — участка днища этот угол колеблется в пределах от 2° до 7°. Чем шире и короче этот рабочий участок днища, тем меньше оптимальный угол атаки, и наоборот. Это обусловлено тем, что на широкой и короткой, похожей на крыло самолета, глиссирующей пластине образуется значительно большая подъемная сила, чем на движущейся с той же скоростью узкой и длинной пластине.
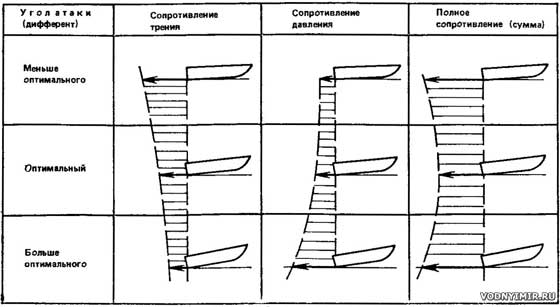
Угол атаки и сопротивление воды движению глиссирующего катера
В среднем величина угла атаки составляет:
— для реданных и трехточечных высокоскоростных глиссеров и катамаранов 2,5-3°;
— для катеров с обычным соотношением размерений 3-4°;
— для катамаранов без поперечных реданов и катеров с обводами глубокое V 5-7°.
Почему же в определенных условиях оптимальный угол атаки оказывается лежащим в столь ограниченных, узких пределах?
Сопротивление воды установившемуся движению глиссирующего катера состоит из двух слагаемых: сопротивления трения и сопротивления давления встречного потока воды. Сопротивление трения с увеличением угла атаки уменьшается, так как при постоянной (от скулы до скулы) ширине днища его смоченная длина — длина глиссирующего участка днища — уменьшается, а значит, меньше становится и смоченная поверхность. Сопротивление же давления, наоборот, с увеличением угла атаки возрастает. То значение угла атаки, при котором сумма обеих этих составляющих минимальна, и будет оптимальным.
Изменение угла атаки днища лодки в зависимости от частоты вращения двигателя (указана в % номинальной)
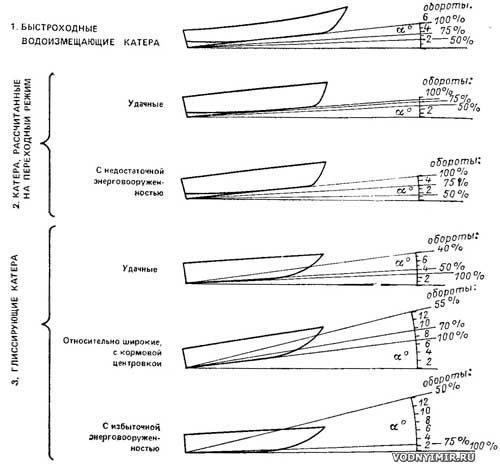
Ходовой дифферент (условно будем считать, что это — то же самое, что и угол атаки) изменяется в довольно широких пределах в зависимости от скорости катера, т. е. с повышением частоты вращения коленчатого вала двигателя от минимально устойчивой до номинальной.
Дифферент быстроходных водоизмещающих катеров при этом плавно возрастает до 5-6°.
Удачно спроектированные и отцентрованные катера для переходного режима при частоте вращения 50% номинальной идут с дифферентом около 3°, затем, с дальнейшим увеличением числа оборотов, дифферент увеличивается, но уже менее заметно. Если же энерговооруженность катера для переходного режима недостаточна (менее 15 кВт/т или 21 л. с./т), то увеличение дифферента будет особенно интенсивно происходить как раз на частоте вращения, приближающейся к номинальной.
Удачные глиссирующие катера получают максимальный ходовой дифферент (однако не более 8°) при частоте вращения около 40% номинальной; затем дифферент уменьшается до оптимального значения, соответствующего номинальным оборотам и максимальной скорости; как отмечалось выше, это 3-4°.
Относительно широкие глиссирующие катера на всем диапазоне изменения частоты вращения двигателя обычно имеют чрезмерный дифферент, максимум которого (до 14°) достигается при сравнительно большей частоте вращения, чем у более удачных катеров.
Глиссирующие катера, имеющие избыточную мощность двигателя, при частотах вращения двигателя от 80% номинальной и выше идут с малым ходовым дифферентом (2° и менее). Для таких катеров характерно некоторое снижение скорости при повышении частоты вращения двигателя.
На практике даже удачно спроектированные серийные катера идут с оптимальным дифферентом далеко не во всем диапазоне скоростей. Обычно наблюдается излишний дифферент в районе так называемого «горба» на кривой сопротивления, что соответствует выходу катера на глиссирование. На полном же ходу глиссирующие катера, наоборот, довольно часто идут с дифферентом, который меньше оптимального.
От чего зависит величина ходового дифферента?
Рассмотрим упрощенную схему сил и моментов, действующих на глиссирующий катер на ходу.
Силы и моменты на корпусе глиссирующего катера
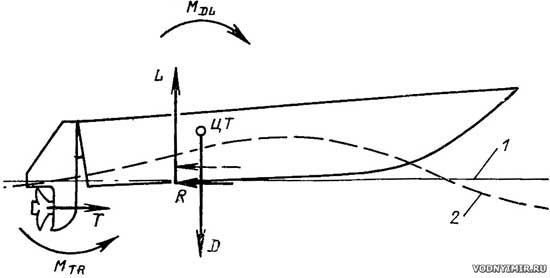
1 — поверхность воды в режиме глиссирования; 2 — профиль волны
при выходе на глиссирование.
Равновесие определяется величиной и взаимным расположением четырех основных сил: массы катера D; силы поддержания L; тяги гребного винта Т; сопротивления воды движению катера R.
Массу катера будем считать в данных условиях постоянной. Сила поддержания равна массе катера по величине и противоположна по направлению. Силы тяги и сопротивления возрастают по мере повышения частоты вращения коленвала двигателя, т. е. пока катер разгоняется до максимальной скорости полного хода.
Силы D и L создают момент, дифферентующий катер на нос. Этот момент при установившемся движении уравновешивается равным по величине и противоположным по направлению моментом сил Т и R.
До выхода на глиссирование — в режиме водоизмещающего движения малым ходом сила поддержания L состоит в основном из архимедовой силы, величина которой определяется объемом погруженной части корпуса судна — массой вытесненной корпусом воды, т. е. водоизмещением (массой) судна. Распределение погруженного объема по длине катера существенно изменяется в зависимости от скорости, чем и обусловлено изменение ходового дифферента. С увеличением скорости растет носовая поперечная волна, нос катера всплывает, а корма погружается в воду до тех пор, пока снова не будет достигнуто равновесие, т. е. равенство действующих на судно противоположных по направлению моментов.
С дальнейшим повышением скорости начинает заметно возрастать образующаяся на плоской пластине днища гидродинамическая подъемная сила и уменьшаться — архимедова сила (общая же их сумма, т. е. сила поддержания, подчеркнем, остается неизменной). Катер всплывает всем корпусом и начинает глиссировать.
При установившемся глиссировании силу поддержания L уже почти целиком составляет гидродинамическая подъемная сила. Эта сила зависит от площади глиссирующей поверхности днища, ее формы, угла атаки (дифферента) и скоростного напора воды. В то же время по величине она (по условию равновесия) по-прежнему должна быть равна массе судна D, т. е. должна оставаться постоянной. Именно поэтому с повышением скорости, т. е. с увеличением скоростного напора воды, должны соответственно уменьшиться площадь глиссирующего участка или угол атаки, либо то и другое одновременно.
Разумеется, для достижения наибольших скоростей было бы выгодно уменьшение смоченной поверхности, дающее заметное снижение сопротивления трения. Однако в этом случае вследствие укорочения глиссирующего участка (ширина ее от скулы до скулы в общем случае постоянна) точка приложения силы L существенно смещается в корму и тем самым нарушается равенство моментов сил. Нос глиссера начинает опускаться, значительно уменьшается угол атаки, а смоченная поверхность днища вновь увеличивается. В результате значительно повышается сопротивление трения, а, следовательно, и полное сопротивление воды движению катера. Судно не добирает скорость, имеет жесткий ход при волнении.
Такова общая картина изменения дифферента в зависимости от скорости. Рассмотрение ее дает основание для практически очень важного вывода. Поскольку при проектировании катера его рассчитывают на какую-то одну определенную скорость, а при эксплуатации на всех других скоростях его дифферент оказывается не оптимальным, целесообразно оборудовать глиссирующий катер какими-либо средствами управления ходовым дифферентом. К числу таких средств относятся дифферентовочные цистерны, управляемые транцевые плиты и управление углом наклона оси гребного винта.
Первоначально указанные средства появились и использовались лишь для исправления явных ошибок, допущенных при проектировании катера. Если, например, катер в переходном режиме идет с высоко задранным носом при мощном волнообразовании, то всплыть корме (уменьшить дифферент) и выйти на режим глиссирования помогают отгиб днища в корме вниз и фиксированные (неуправляемые) транцевые плиты.
Отгиб днища вниз у транца (установка клиновой наделки) для уменьшения дифферента катера на расчетном режиме
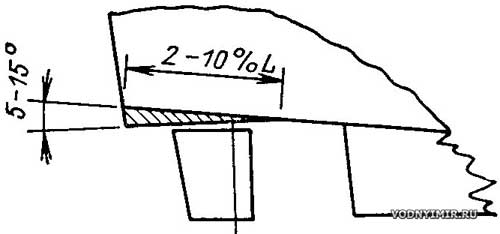
L — длина катера по скуле.
Нерегулируемая транцевая плита
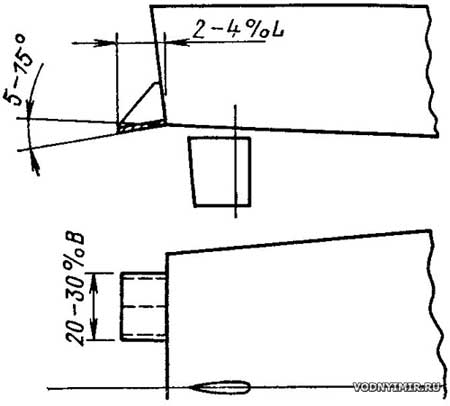
В — ширина катера по скуле.
Эти меры дают двойной эффект: благодаря изменению продольного профиля днища повышается подъемная сила, а точка приложения силы поддержания L смещается в корму, что способствует уменьшению дифферента.
Следующий шаг вперед — регулируемые транцевые плиты. Регулировка их положения на стоянке позволяет подобрать оптимальный для предстоящих условий конкретного плавания угол отклонения плит от плоскости днища и, следовательно, обеспечить движение с оптимальным дифферентом во всем диапазоне скоростей.
Отсюда недалеко и до управляемых транцевых плит, угол отклонения которых может быть изменен на ходу. Две такие плиты по бортам с раздельным управлением дают, кроме того, и возможность при помощи изменения гидродинамических сил выравнивать крен катера на повороте, от несимметричной нагрузки, вращающего момента винта и т. п. Привод управляемых транцевых плит может быть механическим с ручным управлением, электромеханическим и электрогидравлическим.
Существуют и конструкции не просто управляемых, а автоматических транцевых плит, угол отклонения которых изменяется автоматически в зависимости от дифферента катера и скоростного напора. Эта обратная связь обеспечивает оптимальное управление дифферентом в расчетном диапазоне скоростей. Приводим схемы стартового устройства «Аква-Стабс» (США), а также параллелограммного механизма фирмы «Ден Оуден» (Голландия).
Транцевые плиты с автоматическим изменением угла установки
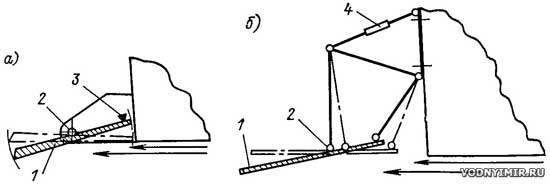
а — тяжелые» плиты «Аква-Стабс»; б — плита «Ден Оуден».
1 — плита; 2 — ось вращения; 3 — упор-ограничитель на кронштейне;
4 — регулируемое звено.
Разновидность управляемых транцевых плит — встроенные триммеры обеспечивают повышенную живучесть узла и минимум помех при маневрировании: в нерабочем положении плиты вписываются в поверхность кормовой части днища и лишь при отклонении выходят вниз. Аналогичное устройство имеет кормовой стабилизатор на известном реданном катере «Дайнаплейн». Плита, утопленная в днище, при помощи гидравлического привода выдвигается с заданным углом атаки. Катер этот показал исключительно высокие ходовые качества при удовлетворительной мореходности.
Известный катеростроитель Хуан Баадер очень точно сказал: «Транцевые плиты — отличный пример того, как благодаря несложным мероприятиям достигаются большие успехи».
Практическим руководством для полного расчета управляемых транцевых плит могут служить статья А. С. Павленко и С. Б. Соловья в «КиЯ» № 40 и книга Н. Т. Егорова, М. М. Бунькова и Н. Н. Садовникова «Ходкость и мореходность глиссирующих катеров» (Л., «Судостроение», 1978). Интересен опыт В. С. и А. И. Кулешевых, применивших и серьезно испытавших транцевые плиты с электроприводом на 7-метровом катере «Баргузин». По их расчетам применение транцевых плит на мотолодке «Прогресс» при эксплуатации ее с одним мотором «Вихрь» при водоизмещении D=700 кг дает выигрыш в скорости до 27-38% (в зависимости от центровки), а с мотором «Вихрь-М» 13-31%. Думается, стоит напомнить в этой связи вывод, сделанный в статье «Союз винта и корпуса» в том же номере сборника: «Установка подобных плит экономически целесообразна на многих моторных лодках, особенно на тех из них, которые эксплуатируются при значительной нагрузке и недостаточной мощности мотора».
Движение катеров с углами атаки меньше оптимального не так бросается в глаза, как излишний дифферент в переходном режиме. Повышенное сопротивление воды и связанная с ним потеря скорости при чрезмерно малом дифференте не так очевидны и присущи только действительно быстроходным катерам. Если глиссирующий катер идет с дифферентом менее 2°, почти наверняка можно сказать, что он не добирает добрых 5 км/ч за счет повышенного сопротивления трения. Если заставить этот катер идти с большим дифферентом, можно получить явную прибавку скорости.
Однако транцевые плиты в данном случае окажутся бессильны. Благодаря плитам можно создать момент, прижимающий нос к поверхности воды, но невозможно увеличить действительный угол атаки. Здесь может помочь смещение центра тяжести в корму. На легкой гоночной лодке для этого достаточно водителю переместиться ближе к транцу. На крупных гоночных катерах приходится применять цистерны водяного балласта, при помощи которых можно изменять центровку в зависимости от условий движения. Однако устройство цистерн сравнительно сложно и не позволяет быстро осуществлять тонкую регулировку дифферента.
Определенное влияние на момент сил Т и R оказывает наклон оси гребного винта к горизонту. В последние годы развиваются и успешно применяются конструкции, позволяющие на ходу откидывать подвесной мотор или угловую колонку на величину до 60-75° от вертикали — вплоть до выхода гребного винта из воды.
Влияние угла откидывания угловой колонки на дифферентовку катера
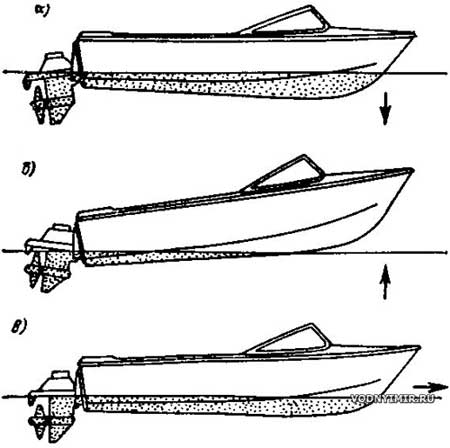
а — отрицательный угол наклона оси винта вызывал появление
дифферента на нос; б — чрезмерное откидывание колонки привело к увеличению дифферента на корму; в — нормальный дифферент.
Появившись первоначально как устройство, облегчающее очистку гребного винта, осмотр и замену его на плаву, а также предохраняющее винт при подходе к необорудованному берегу, устройство для дистанционного откидывания колонки стало все чаще использоваться для активного управления ходовым дифферентом. Изменение наклона оси гребного винта производится при помощи механического, электромеханического или гидравлического привода.
Серия испытаний убедительно продемонстрировала эффективность этого способа изменения дифферентовки катера на ходу. Отрицательный наклон оси винта позволил на режиме плавания при полной нагрузке (6 чел.) вдвое увеличить скорость при одновременном снижении расхода топлива в 1,3 раза.
Положительный наклон оси гребного винта дал возможность получить наивысшую скорость 74,3 км/ч, что на 3,5 км/ч больше скорости полного хода при нейтральном положении линии тяги. При этом катер имел дифферент около 1°, т. е. был явно меньше оптимального. Несомненно, если бы можно было откинуть колонку от транца еще больше, скорость катера могла быть увеличена!
Разумеется, этот способ управления дифферентом катера эффективен только на небольших судах с высокой энерговооруженностью (50 кВт/т или 68 л. с./т и более). С увеличением размерений судна влияние момента тяги на дифферент заметно уменьшается.
Определенные перспективы обещает предложенная за рубежом конструкция управляемого триммера в виде одного или двух подводных крыльев, размещаемых под транцем в районе двигателя. Подобное устройство, напоминающее горизонтальные рули подводной лодки, дает возможность на катерах любых размерений создавать как положительный, так и отрицательный дифферентующий момент. Зарубежные специалисты считают, что особенно эффективно сочетание различных средств управления ходовым дифферентом — например транцевых плит и наклона оси гребного винта.
Такое сочетание должно обеспечить возможность при изменениях погоды и нагрузки судна, при использовании как полной мощности силовой установки, так и части ее, — всегда идти с оптимальным дифферентом, а значит — с наибольшей возможной в данных условиях скоростью при наименьших затратах топлива.
В заключение остается пожелать любителям-судоводителям, заинтересовавшимся данным вопросом, поэкспериментировать, изменяя угол откидывания своего подвесного мотора. Естественно, непременным условием подобных опытов должна быть определенная точность замера скорости. Как показывает опыт, даже столь простое средство дает практически ощутимый результат.
Е. А. Морозов, «Катера и яхты», 1980 г.
Поделитесь этой страницей в соц. сетях или добавьте в закладки:
Триммер и транцевые плиты на лодке
Давайте сначала определимся для чего нам вообще регулировать ходовой дифферент лодки и что это нам даст. Если говорить о глиссирующих судах, то для них подобный механизм даёт очень заметный эффект и без таких устройств зачастую просто не обойтись.
Триммер на лодочном моторе
 Начнем с максимальной скорости, как важного показателя для любого судна. Скорость во многом зависит от создаваемого корпусом сопротивления, которое в свою очередь определяется в том числе и площадью соприкосновения участка днища с водой в момент глиссирования (такой участок днища специалисты ещё называют “смоченная поверхность”) – чем она меньше, тем меньше мощности лодочного мотора необходимо для преодоления силы трения днища о воду и тем выше скорость лодки. А если мы будем регулировать ходовой дифферент с помощью триммирования (изменения угла наклона лодочного мотора) – площадь “смоченной поверхности” можно изменять в достаточно большом диапазоне. Для достижения максимальной возможной скорости (в теории) нужно обеспечить максимальный дифферент на корму, чтобы лодка шла на одном “пятаке” при минимальном сопротивлении. Но на деле такое обеспечить на так то просто.
Начнем с максимальной скорости, как важного показателя для любого судна. Скорость во многом зависит от создаваемого корпусом сопротивления, которое в свою очередь определяется в том числе и площадью соприкосновения участка днища с водой в момент глиссирования (такой участок днища специалисты ещё называют “смоченная поверхность”) – чем она меньше, тем меньше мощности лодочного мотора необходимо для преодоления силы трения днища о воду и тем выше скорость лодки. А если мы будем регулировать ходовой дифферент с помощью триммирования (изменения угла наклона лодочного мотора) – площадь “смоченной поверхности” можно изменять в достаточно большом диапазоне. Для достижения максимальной возможной скорости (в теории) нужно обеспечить максимальный дифферент на корму, чтобы лодка шла на одном “пятаке” при минимальном сопротивлении. Но на деле такое обеспечить на так то просто.
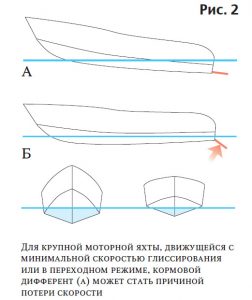 На крупных и тяжелых лодка типа моторных яхт такое обеспечить не получиться. Такие суда не очень быстроходные – их максимальная скорость зачастую не превышает 25 узлов (46 км/ч). И даже при чистом глиссировании у них значительная ходовая осадка. А при движении с кормовым дифферентом скорость падает еще на 2-3 узла (3-5 км/ч) по сравнению с движением, когда линия киля параллельна воде. При глубоко просаженной корме площадь лобового сопротивления оказывается больше. От сюда и падение скорости.
На крупных и тяжелых лодка типа моторных яхт такое обеспечить не получиться. Такие суда не очень быстроходные – их максимальная скорость зачастую не превышает 25 узлов (46 км/ч). И даже при чистом глиссировании у них значительная ходовая осадка. А при движении с кормовым дифферентом скорость падает еще на 2-3 узла (3-5 км/ч) по сравнению с движением, когда линия киля параллельна воде. При глубоко просаженной корме площадь лобового сопротивления оказывается больше. От сюда и падение скорости.
Для достижения максимально возможной скорости на вашей лодке откидывайте мотор короткими последовательными нажатиями на кнопку “UP”, нос лодки начнет приподниматься на водой. В это время следите на её поведением, слушайте звук мотора и смотрите на тахометр. Граница, за которую уже переступать не стоит, находится достаточно легко по резкому увеличению оборотов мотора. Это говорит о том, что дальше откидывать движитель не нужно, т.к. винт начал подхватывать воздух. Как только достигли этой границы, двумя короткими нажатиями на “DOWN” опустите мотор, восстанавливая упор – всё ваша максимальная скорость найдена.
Но далеко не все лодки проходят это испытание ровно и четко. На этот процесс могут оказывать влияние обводы корпуса, нагрузка, распределение груза на борту, мощность мотора, высота его установки, вес мотора.
К примеру, винт може и не сорваться резко в кавитацию, обороты двигателя могут расти плавно при изменения угла наклона, но в какой то момент скорость перестанет расти. Определить этот момент можно по GPS или с помощью встроенного спидометра на вашем катере (если таковой имеется). Конечно, в абсолютных значениях он может очень сильно привирать, но вот определить границу он поможет. С помощью уменьшения угла откидки мотора, приведите обороты двигателя в норму, не меняя при этом скорость. Постоянная работа на повышенных оборотах не идёт мотору на пользу, да и топливо при таком режиме расходуется гораздо быстрее.
На некоторых корпусах лодок не кавитация гребного винта будет сигналом достижения максимальной скорости, а дельфинирование – лодка будет с определённой периодичностью кивать носом, даже не спокойной воде. Как правило, дальнейшего роста скорости добиться не получиться, но даже если вам и удастся при таком скачкообразном движении выжать пару км/ч, всё таки мотор следует немного “поджать”, стабилизировать ход, если и не ради себя, то хотя бы ради ваших пассажиров, да и со стороны такая манера передвижения по воды выглядит, как минимум, не профессионально.
Если при дельфинировании вы будете получать только лишь косые взгляды со стороны и ухудшите себе и пассажирам комфорт на борту, то появление поперечной раскачки и рыскание – очень серьезные симптомы полной потери управления, особенной это опасно при волнении на воде. Так могут вести себя легкие лодки с излишне мощными моторами. Смоченная поверхность контакта с водой у них настолько мала, что никакой стабильности хода по курсу и крену она обеспечит не может. В таком случае у вас есть два варианта: сбросить скорость, при этом лодка чуть чуть просядет и лучше “зацепиться” за воду; или использовать триммер, “поджав” немного мотор и опустив при этом нос лодки.
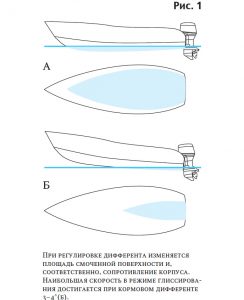
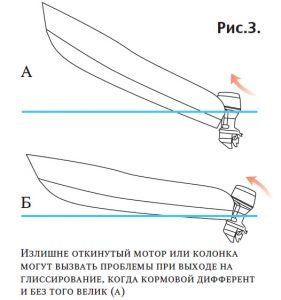 За счет уменьшения пятна контакта корпуса лодки с водой конечно же повышается скорость, но в некоторых случаях такой искусственный дифферент на корму может только помешать разогнаться. Большинство лодок, с самыми разными обводами и типами корпусов, при выходе на режим глиссирования преодолевают так называемый “горб сопротивления” и в этот момент и так излишне задирают нос. А если при этом еще и мотор сильно откинут, то процесс перехода на глисс может либо сильно затянуться либо вообще глиссирования не случиться (см. Рис. 3-А). Бывало встречались мне на воде владельцы лодок с мощными моторами, которые изображали “кобру”, сильно откидывали мотор на старте и резко давали “газу”. Только вот такая небезопасная забава может привести к перевороту лодки через транец или завалу на бок. С пассажирами на борту такой “трюк” выполнять точно не стоит. При разгоне же мотор должен быть максимально зажат, и только когда нос лодки при разгоне начнет сам опускаться вниз можно нажимать кнопку “UP” на триммере.
За счет уменьшения пятна контакта корпуса лодки с водой конечно же повышается скорость, но в некоторых случаях такой искусственный дифферент на корму может только помешать разогнаться. Большинство лодок, с самыми разными обводами и типами корпусов, при выходе на режим глиссирования преодолевают так называемый “горб сопротивления” и в этот момент и так излишне задирают нос. А если при этом еще и мотор сильно откинут, то процесс перехода на глисс может либо сильно затянуться либо вообще глиссирования не случиться (см. Рис. 3-А). Бывало встречались мне на воде владельцы лодок с мощными моторами, которые изображали “кобру”, сильно откидывали мотор на старте и резко давали “газу”. Только вот такая небезопасная забава может привести к перевороту лодки через транец или завалу на бок. С пассажирами на борту такой “трюк” выполнять точно не стоит. При разгоне же мотор должен быть максимально зажат, и только когда нос лодки при разгоне начнет сам опускаться вниз можно нажимать кнопку “UP” на триммере.
На ходу так же может возникнуть необходимость “занутрить” мотор. На максимальной скорости многие лодки сильно теряют в маневренности, радиус циркуляции увеличивается, а при поворотах, винт то и дело подхватывает воздух, теряя упор. Так что, при интенсивном траффике на воде, при проходе под мостами лучше пожертвовать скоростью в угоду управляемости и опустить мотор, уменьшить кормовой дифферент, но получить четкое следование по курсу.
Так стоит поступать и ветреную погоду, т.к. кормовой участок днища на многих лодках имеет минимальную килеватость и движение по волнам будет сопровождаться прыжками и резкими ударами. Опустите немного нос и это заметно улучшит мягкость хода. Чем больше килеватость днища в районе форштевня, тем лучше судно “режет” волну и тем лучших результатов можно добиться.
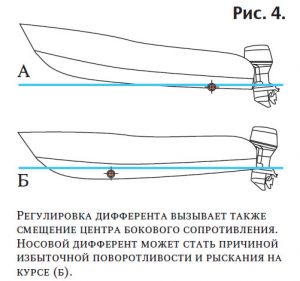 Триммер – это палка о двух концах, получая что то одно, вы теряете в другом. Так что не надо кидаться в крайности, а лучше найти “золотую середину”. Если вы слишком сильно поджимаете мотор к транцу, появляется уже носовой дифферент, который может стать причиной излишней маневренности лодки или даже “рыскливости”, т.к. смещается центр бокового сопротивления с миделя на нос из-за увеличения смоченной поверхности корпуса судна (см. Рис. 4). При определённых обстоятельствах избыточная поворачиваемость лодки, когда она поворачивает на бОльшие углы, нежели это задается штурвалом/румпелем, может быть крайне опасной. Сильнее всего это проявляется на мореходных лодках, у которых килеватость носовой части повышена. И иногда прижатый к транцу мотор может вызвать самопроизвольный разворот на 180 градусов и привести к опрокидыванию лодки. Спровоцировать такую ситуацию можно если в момент поворота штурвала еще и сильно сбросить газ или идти по попутной волне.
Триммер – это палка о двух концах, получая что то одно, вы теряете в другом. Так что не надо кидаться в крайности, а лучше найти “золотую середину”. Если вы слишком сильно поджимаете мотор к транцу, появляется уже носовой дифферент, который может стать причиной излишней маневренности лодки или даже “рыскливости”, т.к. смещается центр бокового сопротивления с миделя на нос из-за увеличения смоченной поверхности корпуса судна (см. Рис. 4). При определённых обстоятельствах избыточная поворачиваемость лодки, когда она поворачивает на бОльшие углы, нежели это задается штурвалом/румпелем, может быть крайне опасной. Сильнее всего это проявляется на мореходных лодках, у которых килеватость носовой части повышена. И иногда прижатый к транцу мотор может вызвать самопроизвольный разворот на 180 градусов и привести к опрокидыванию лодки. Спровоцировать такую ситуацию можно если в момент поворота штурвала еще и сильно сбросить газ или идти по попутной волне.
 Излишний носовой дифферент может привести и к другим побочным эффектам – лодки с ярко выраженным килеватым корпусом могут залечь на левый борт, зарывшись в воду скулой. Левый крен здесь вызывается реактивным моментом гребного винта с правым вращением, который создает и “паразитное” усилие на штурвале (кстати, при переходе на “скоростной” кормовой дифферент это усилие может не только пропасть, но и после дальнейших нажатий на кнопку “UP” поменяться на противоположное – в принципе, это нормально). Для исключения негативных эффектов от излишнего поджатия мотора к транцу на большинстве современных подвесных лодочных моторах предусмотрен ограничитель угла “поджатия”, нужно лишь установить упорную чеку в отверстие подвески (См. Рис. 5).
Излишний носовой дифферент может привести и к другим побочным эффектам – лодки с ярко выраженным килеватым корпусом могут залечь на левый борт, зарывшись в воду скулой. Левый крен здесь вызывается реактивным моментом гребного винта с правым вращением, который создает и “паразитное” усилие на штурвале (кстати, при переходе на “скоростной” кормовой дифферент это усилие может не только пропасть, но и после дальнейших нажатий на кнопку “UP” поменяться на противоположное – в принципе, это нормально). Для исключения негативных эффектов от излишнего поджатия мотора к транцу на большинстве современных подвесных лодочных моторах предусмотрен ограничитель угла “поджатия”, нужно лишь установить упорную чеку в отверстие подвески (См. Рис. 5).
Даже моторные лодки с классическими корпусами будут иметь свою индивидуальную специфику в каждом конкретном случае и оптимальный дифферент придется подбирать только опытным путём. Компактные лодки сильно зависят от нагрузки и распределения веса на борту. Если сильно загрузить нос, то для достижения максимальной скорости мотор потребуется откинуть на бОльший угол, нежели на пустой лодке.
 Со спортивными лодками с несколькими реданами дела обстоят немного по другому. Для них постановка лодки на кормовую пятку не всегда подходит, т.к. их корпуса изначально рассчитаны на движение с опорой на несколько пяток. При чрезмерном задирании носа такая лодка получит только непредсказуемое поведение, еще и скорость потеряет. Реданированный корпус при движении должен опираться не менее чем на две опоры – транец и ближайший к нему редан (См. Рис. 6). Но после подбора оптимального дифферента на такой скоростной лодке, его очень скоро придется снова менять, т.к. двигатели таких лодок обладают огромной мощностью и, в следствии чего, поглощают топливо вёдрами, опорожняя топливный бак очень быстро, а это в свою очередь меняет изначальную центровку.
Со спортивными лодками с несколькими реданами дела обстоят немного по другому. Для них постановка лодки на кормовую пятку не всегда подходит, т.к. их корпуса изначально рассчитаны на движение с опорой на несколько пяток. При чрезмерном задирании носа такая лодка получит только непредсказуемое поведение, еще и скорость потеряет. Реданированный корпус при движении должен опираться не менее чем на две опоры – транец и ближайший к нему редан (См. Рис. 6). Но после подбора оптимального дифферента на такой скоростной лодке, его очень скоро придется снова менять, т.к. двигатели таких лодок обладают огромной мощностью и, в следствии чего, поглощают топливо вёдрами, опорожняя топливный бак очень быстро, а это в свою очередь меняет изначальную центровку.
Использую триммер на лодочном моторе не забывайте и о технической стороне процесса. На подвесных моторах гидронасос системы откидки приводится в движение электромотором, которому при смене угла наклона нужно преодолевать не столько вес самого мотора, сколько создаваемый им упор во время движения. Энергии расходуется много, а это общая сеть судна и об этом нужно помнить. На подвесных лодочных моторах относительно небольшой мощности системы откидки имеет один режим – “быстрый”. Более мощные модели оснащаются двухскоростной системой, и при регулировке дифферента используется “медленный” режим, который обеспечивает не только высокую точность выставления угла наклона, но ещё и обладающий большей силой, а на больших скоростях упор дейдува о воду будет очень мощным.
Нажатия на кнопки триммера должны быть короткими и последовательными. После каждого нажатия лучше выдержать паузу и посмотреть на происходящие изменения в поведении лодки. Если мотор оборудован указателем угла откидки это хорошо, но его показания не стоит воспринимать буквально. Если при одном выходе на воду вы подобрали оптимальный угол для максимальной скорости, то при следующем, предыдущие настройки могут вообще не сработать, по причине другой загрузки лодки, другой погоды, волнении и т.п. Ну и использовать триммер можно не только для корректировки дифферента, но и для просто откидки мотора при прохождении мелководья или выходу на берег.
Транцевые плиты

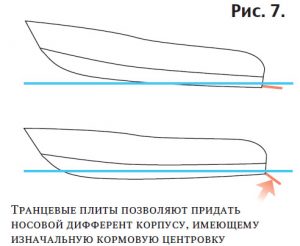 В качестве систем регулирования дифферента судна используются и транцевые плиты. Устанавливаются они, как правило, на достаточно больших лодках. От триммера они отличаются тем, что могут создавать лишь носовой дифферент приподнимая корму (См. Рис.7). Поэтому устанавливают транцевые плиты на корпуса лодок с изначальной кормовой центровкой. Применительно к классическим силовым установкам с наклонными валами, не обеспечивающим регулировки дифферента за счет изменения угла наклона лодочного мотора и винта соответственно, такая схема полностью оправданна – если опустить плиты, облегчается выход на глиссирование или прижимается нос к воде при волнении на поверхности; подняв же вы сможете обеспечить максимальную скорость.
В качестве систем регулирования дифферента судна используются и транцевые плиты. Устанавливаются они, как правило, на достаточно больших лодках. От триммера они отличаются тем, что могут создавать лишь носовой дифферент приподнимая корму (См. Рис.7). Поэтому устанавливают транцевые плиты на корпуса лодок с изначальной кормовой центровкой. Применительно к классическим силовым установкам с наклонными валами, не обеспечивающим регулировки дифферента за счет изменения угла наклона лодочного мотора и винта соответственно, такая схема полностью оправданна – если опустить плиты, облегчается выход на глиссирование или прижимается нос к воде при волнении на поверхности; подняв же вы сможете обеспечить максимальную скорость.
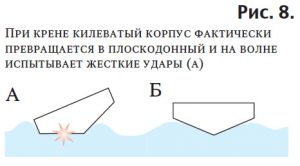 Транцевые плиты ставят так же и на лодки с угловыми колонками и даже с ПЛМ, но как показывает наш опыт, нужды в них зачастую нет. Для решения большинства задач при движении лодки по воде достаточно классического триммера на лодочном моторе или колонке. Иногда кажется, что транцевые плиты сейчас выступают в роли некого элемента престижа на лодке, хотя есть у них одна функция, которая может быть полезна на лодках с большим количеством надстроек на корпусе, которые придают парусность судну. Транцевыми плитами можно корректировать ходовой крен и при необходимости поставить лодку на ровный киль. А крен может легко превратить килеватое судно в плоскодонку и движении по неспокойной воде будет сопровождаться жесткими ударами (См. Рис. 8 А). Хотя если на лодке стоит пара подвесных моторов или колонок проблему крена можно решить просто немного поджав двигатель с соответствующего борта.
Транцевые плиты ставят так же и на лодки с угловыми колонками и даже с ПЛМ, но как показывает наш опыт, нужды в них зачастую нет. Для решения большинства задач при движении лодки по воде достаточно классического триммера на лодочном моторе или колонке. Иногда кажется, что транцевые плиты сейчас выступают в роли некого элемента престижа на лодке, хотя есть у них одна функция, которая может быть полезна на лодках с большим количеством надстроек на корпусе, которые придают парусность судну. Транцевыми плитами можно корректировать ходовой крен и при необходимости поставить лодку на ровный киль. А крен может легко превратить килеватое судно в плоскодонку и движении по неспокойной воде будет сопровождаться жесткими ударами (См. Рис. 8 А). Хотя если на лодке стоит пара подвесных моторов или колонок проблему крена можно решить просто немного поджав двигатель с соответствующего борта.
 Для компенсации крена на левый борт, причиной которого стал ветер или распределение нагрузки на борту, опускаем левую плиту. Если идет крен вправо, используем правую плиту. Вроде бы как всё просто, но запутаться тут можно на “раз-два”. Механика управления транцевыми плитами на разных лодках отличается друг от друга. Логичной выглядит схема когда за каждую из плит отвечает своя качающаяся клавиша на панели. Но управлять такой системой успешно можно только при наличии индикатора положения плит, только вот цена на такой прибор совсем не маленькая. Проблема заключается тут в том, что при смене направления крена играться с плитами можно до бесконечности. К примеру, вы сменили курс, крен от ветра так же изменился, но вот про уже опущенную вниз плиту вы благополучно забыли и будете пытаться выправить крен уже другой, противоположно плитой. И вспомните вы об этом, скорее всего, только тога, когда ваша лодка зароется носов в воду. Так что рекомендуем, если вы используете транцевые плиты, заведите себе привычку “начинать всё с нуля” – если есть малейшие сомнения в положении плит, поднимите обе плиты вверх, а потом уже начинайте корректировать крен. Придать лодке тот или иной дифферент “поверх” уже откорректированного крена здесь несложно – просто нажимайте обе кнопки одновременно.
Для компенсации крена на левый борт, причиной которого стал ветер или распределение нагрузки на борту, опускаем левую плиту. Если идет крен вправо, используем правую плиту. Вроде бы как всё просто, но запутаться тут можно на “раз-два”. Механика управления транцевыми плитами на разных лодках отличается друг от друга. Логичной выглядит схема когда за каждую из плит отвечает своя качающаяся клавиша на панели. Но управлять такой системой успешно можно только при наличии индикатора положения плит, только вот цена на такой прибор совсем не маленькая. Проблема заключается тут в том, что при смене направления крена играться с плитами можно до бесконечности. К примеру, вы сменили курс, крен от ветра так же изменился, но вот про уже опущенную вниз плиту вы благополучно забыли и будете пытаться выправить крен уже другой, противоположно плитой. И вспомните вы об этом, скорее всего, только тога, когда ваша лодка зароется носов в воду. Так что рекомендуем, если вы используете транцевые плиты, заведите себе привычку “начинать всё с нуля” – если есть малейшие сомнения в положении плит, поднимите обе плиты вверх, а потом уже начинайте корректировать крен. Придать лодке тот или иной дифферент “поверх” уже откорректированного крена здесь несложно – просто нажимайте обе кнопки одновременно.
 В продаже можно найти и умные системы управления транцевыми плитами, которые автоматически поднимают опущенную плиту, при активации противоположной. Но если система всё так же управляется качающимися клавишами “Bow Up” и “Bow Down”, то тут тоже придётся поломать голову. Если вы встаёте за штурвал незнакомой лодки, то не лишним будет сначала проконсультироваться про управления у её владельца. Или же сразу после отхода от берега аккуратно понажимать на кнопки и попросить помощника посмотреть, что происходит с плитами. Самой логичной нам кажется система с автоматической работой плит в противофазе и четырехкнопочным пультом, на котором корректировка крена и настройка дифферента более четко отделены друг от друга (См. Рис.10). И самым важным будет замечание – никогда не активируйте плиты длинным нажатием на кнопку, это вам не дверной звонок. Один раз мы чуть не налетели на бетонные плиты набережной, когда один не опытный человек на полном ходу вжал одну из кнопок управления транцевых плит. Избежать столкновение удалось лишь вырубив зажигание. Опущенная до упора левая плита не только завалила лодку на левый борт, но и заставила ее заложить резкий вираж в ту же сторону. Управлять плитами нужно только короткими нажатиями (так же как и триммером) и следить за реакцией судно на каждое из них. Плиты не только корректируют крен, но и оказывают заметное влияние на курс.
В продаже можно найти и умные системы управления транцевыми плитами, которые автоматически поднимают опущенную плиту, при активации противоположной. Но если система всё так же управляется качающимися клавишами “Bow Up” и “Bow Down”, то тут тоже придётся поломать голову. Если вы встаёте за штурвал незнакомой лодки, то не лишним будет сначала проконсультироваться про управления у её владельца. Или же сразу после отхода от берега аккуратно понажимать на кнопки и попросить помощника посмотреть, что происходит с плитами. Самой логичной нам кажется система с автоматической работой плит в противофазе и четырехкнопочным пультом, на котором корректировка крена и настройка дифферента более четко отделены друг от друга (См. Рис.10). И самым важным будет замечание – никогда не активируйте плиты длинным нажатием на кнопку, это вам не дверной звонок. Один раз мы чуть не налетели на бетонные плиты набережной, когда один не опытный человек на полном ходу вжал одну из кнопок управления транцевых плит. Избежать столкновение удалось лишь вырубив зажигание. Опущенная до упора левая плита не только завалила лодку на левый борт, но и заставила ее заложить резкий вираж в ту же сторону. Управлять плитами нужно только короткими нажатиями (так же как и триммером) и следить за реакцией судно на каждое из них. Плиты не только корректируют крен, но и оказывают заметное влияние на курс.
Встречаются и полностью автоматические системы, которые корректируют крен по гироскопическим датчикам горизонта. С одной стороны вещь то вроде полезная, но пригодится она только при длительном движении одним курсом. Реакция плит на изменения крена совсем даже не мгновенная, скорость их работы ограничена гидромоторами и на извилистом фарватере такая система не только сама запутается, но и может серьезно навредить.
И небольшой совет напоследок.: всегда поднимайте транцевые плиты в крайнее верхнее положении на стоянке, дабы рабочие поверхности штоков находились внутри гидроцилиндров – морская вода может быстро вывести из строя гидросистему. Хотя большинство современных систем делают это сами после остановки двигателя.